Research
Selected Current Sponsored Projects
Intrinsically Robust and Interpretable Motion Synthesis for Periodic and Contact-Rich CPS
Sponsor: National Science Foundation
Duration: July. 2025–June 2028
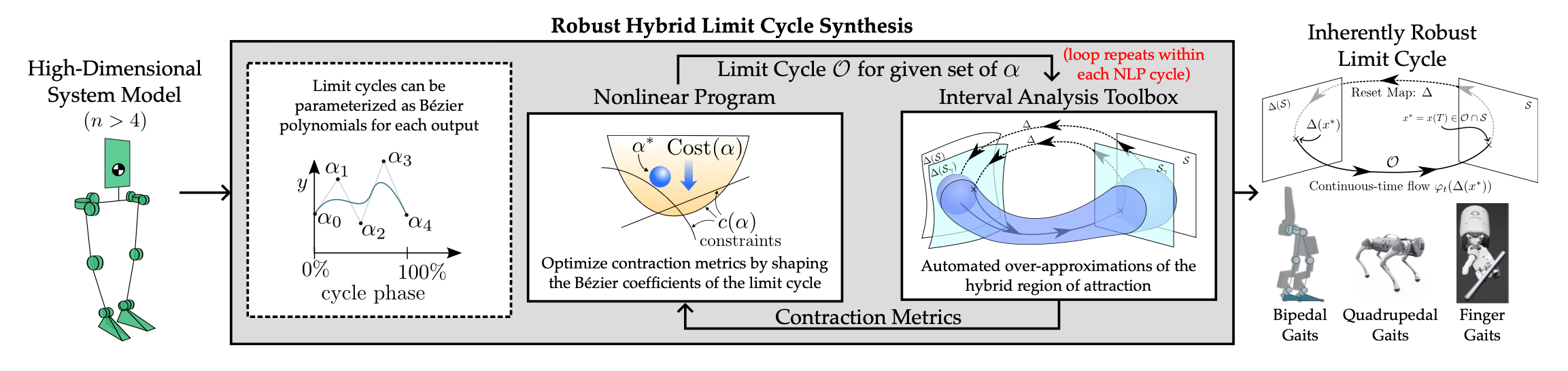
Project Description: Cyber-physical systems (CPS) consist of computational nodes tightly integrated with their physical environments. Such systems often exhibit repetitive or periodic behaviors, for example, orchestrated leg movements in a robotic dog. Other examples include multi-finger manipulators, traffic flow control, and chemical plants. Synthesis of such periodic behaviors is a challenging problem since computation quickly becomes intractable as system complexity increases. This project will alleviate such computational challenges and ensure that synthesized motions are robust against uncertainties in the system model and in its environment, as well as external disturbances. This project is in collaboration with Prof. Maegan Tucker.
CHORUS: Resilient Distributed CPS through Rational and Dynamic Decision-Making Among Multiple Stakeholders
Sponsor: National Science Foundation
Duration: June 2024–May 2029
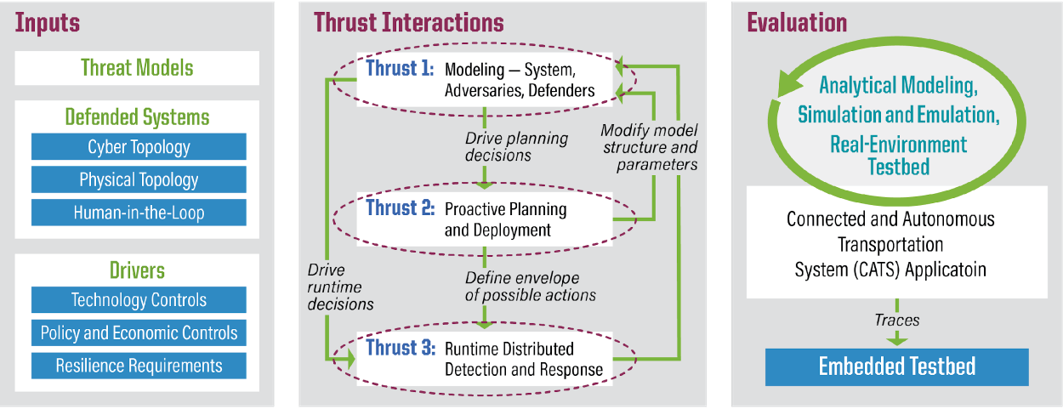
Project Description: Cyber-Physical Systems (CPS) are typically composed of interconnected hardware and software components, which individually may not be inherently highly reliable or secure. However, several CPS applications demand a high degree of safety, security, and reliability. Thus, the fundamental problem is constructing highly dependable CPS applications from building blocks that are, in themselves, not inherently reliable. There has been enormous progress made in understanding and patching various classes of vulnerabilities in large-scale distributed CPS. However, these efforts at designing and operating resilient CPS have often been stymied by the lack of understanding of the impact of any perturbation to the overall system, under the economic and policy constraints involved in any realistic real-world CPS. We define perturbations as failures due to: (1) unintended errors in hardware/software, (2) security attacks, (3) unexpected interactions among cyber-physical and human elements including natural disasters, and (4) incomplete cooperation among stakeholders. In this project, we address these shortcomings to challenges to create resilient, large-scale CPS through our CHORUS Frontier award. Chorus will develop rigorous, scientific mechanisms to enable CPS resilience against a large universe of perturbations. Our application domain is Connected and Autonomous Transportation Systems (CATS) and thus, the benefits of CHORUS will be demonstrated through improvements in safety and security in this domain.
Learning-Enabled Assistive Driving: Formal Assurances during Operation and Training
Sponsor: National Science Foundation
Duration: Jun. 2022–May 2026
Project Description: Despite claims in popular media, current "self-driving" and advanced driver assist systems (ADAS), based on purely data-driven, machine learning algorithms may still suffer from catastrophic failures. This tendency of "theoretical statistical accuracy" but "demonstrated fragility in practice" makes current deep learning algorithms unsuitable for use within feedback loops for safety-critical, cyber-physical applications such as assisted or unsupervised self-driving cars in traffic. Regardless of these shortcomings, it is certain that automation and autonomy will play a crucial role in future mobility solutions, either for personally owned or shared-mobility vehicles; and regardless of the level of automation, at least in the foreseeable future, the driver should be in the loop. There is currently a need to quantify the impact of the human driver within the autonomy loop, both from an individual experiential perspective, as well as in terms of safety. In addition, the next generation of "self-driving" or "driver-assist" systems should be able to sense, learn and anticipate driver's habits, skills and adapt accordingly, thus making driving more intuitive and safer at the same time. How to best integrate the driver's learning goals and preferences in a transparent manner to enhance the "driving experience" without sacrificing safety requires further work, however. The main objective of this research is to utilize techniques and models from reinforcement learning and formal methods to develop the next generation of ADAS that can accommodate the driver preferences and habits with safety constraints.
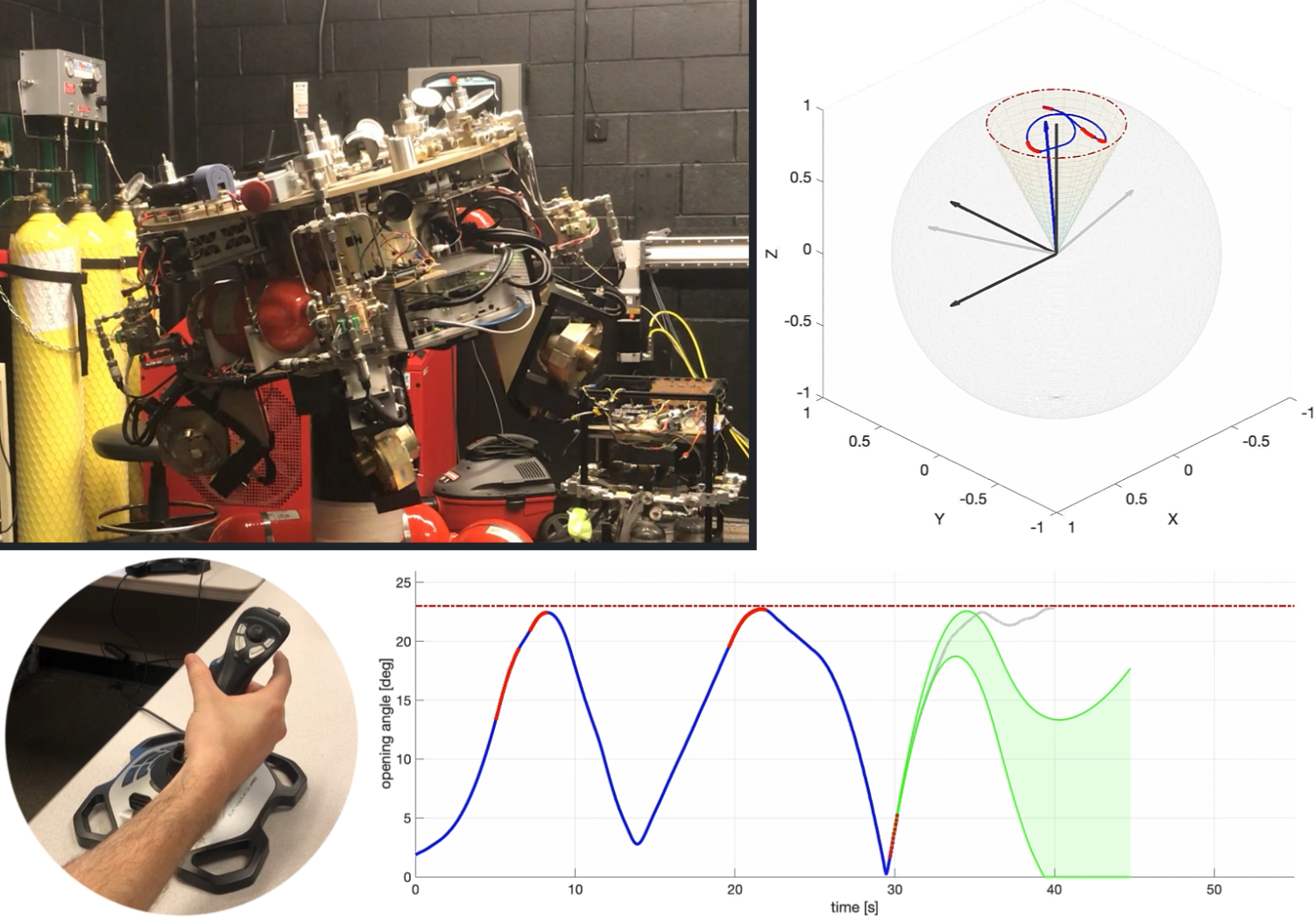
Safe Autonomy from Runtime Reachability for Learning-Enabled Systems
Sponsor: Air Force Office Scientific Research
Duration: Aug 2023–Jul. 2026
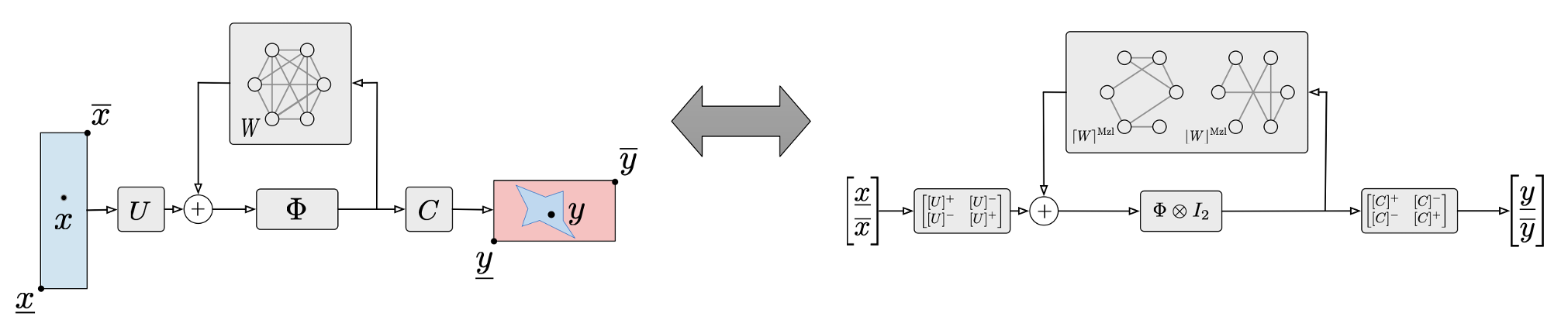
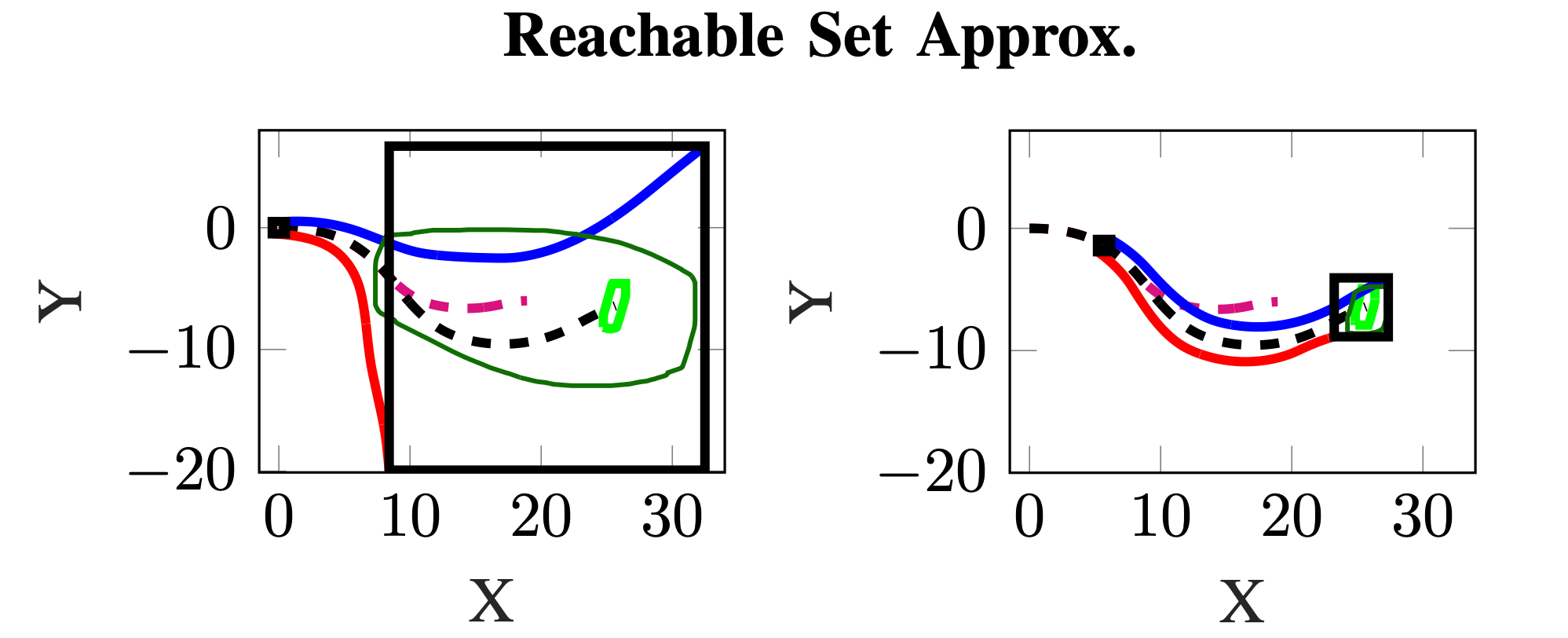
This project will develop theory and algorithms for enabling safe autonomy of learning-enabled systems via reachability analysis conducted at runtime. An emerging challenge is to certify or guarantee correct behavior of nonlinear control systems with learning-enabled components. Such systems are generally not amenable to traditional offline analysis methods due to their scale, complexity, or adaptable design. An alternative to offline safety verification in these cases is to enforce at runtime that the system does not evolve into unsafe conditions, which requires predicting possible future system states and intervening at the controller if needed to maintain safety, an approach referred to as runtime assurance. Reachability analysis is concerned with computing possible future system states of a dynamical system and is thus a critical sub-component in classical offline verification and approaches to runtime assurance. However, most reachability methods are generally slow and do not scale well, making them ill-suited for runtime computations on complex systems. This project aims especially to leverage and significantly extend recent results in efficient and scalable reachability analysis for nonlinear systems to develop a comprehensive theory of runtime assurance for learning-enabled systems.
Human-AI Collaboration in Autonomous Aerial Vehicles
Sponsor: Office of Naval Research
Duration: Jul. 2021–Jun. 2026
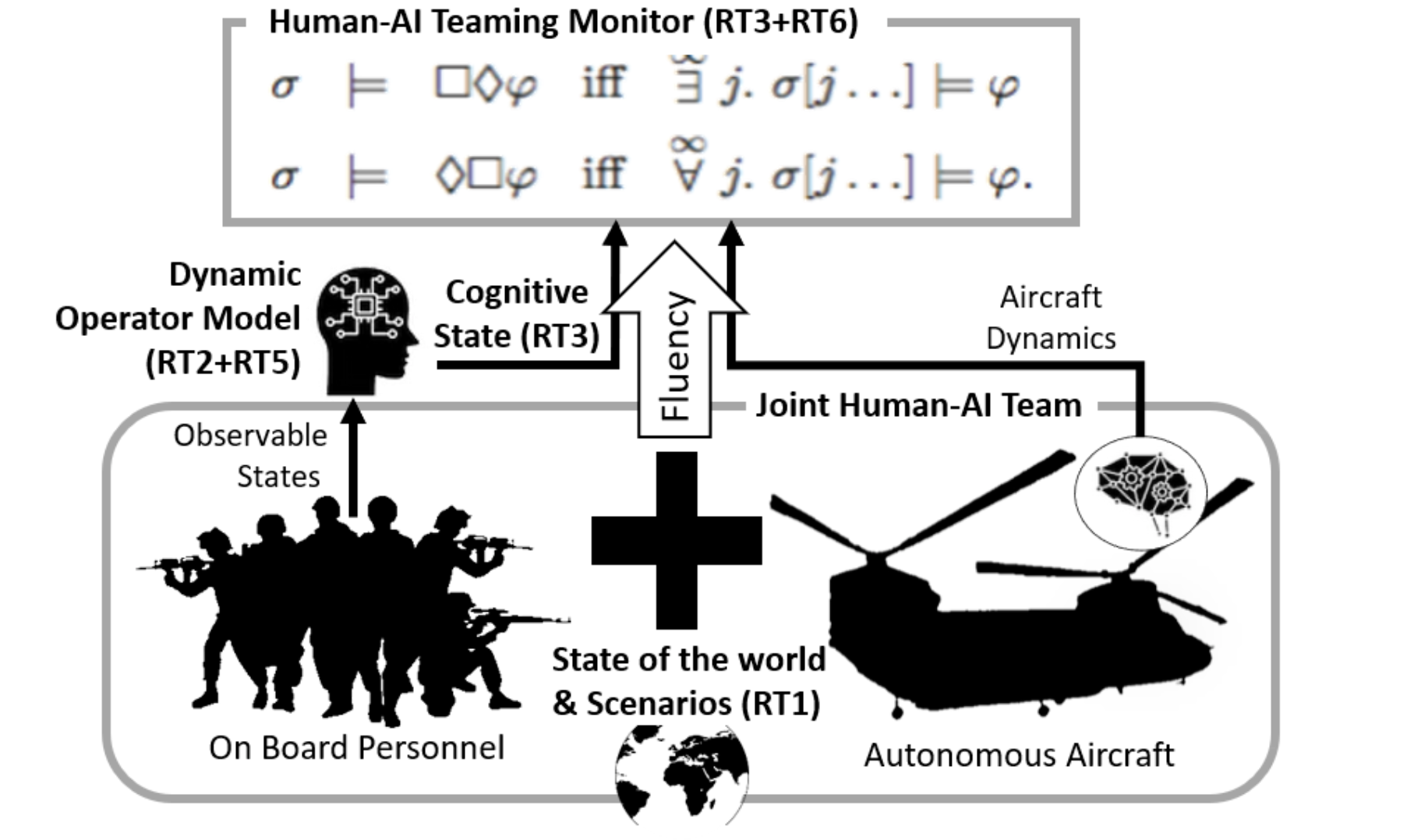
Project Description: In the rapidly advancing world of autonomous aircraft, all of the basic aviation functions will likely be handled completely and competently by AI agents embedded within air vehicles. Under nominal conditions (and many basic off-nominal situations) the AI-controlled vehicle will operate autonomously and independently without input from on-board personnel. However, no mission is ever completely nominal, and many open questions remain about how on-board personnel and AI controlling the vehicle should collaborate effectively. Fluency is the quality of interaction between a human and a robot and has been used to evaluate many aspects of human-robot teaming. In this project, we ask: What is the impact of Human-AI teaming, i.e. fluency on mission effectiveness, and how can it be fostered and maintained? The goal of this research is to enable appropriate human-AI collaboration needed to deal with off-nominal events by (1) characterizing the challenges to fluency created by human biases and cognitive limitations as they impact Human-AI interaction, (2) quantifying the impact of fluency on mission effectiveness, and (3) exploring and validating mitigation strategies.
Secure and Safe Assured Autonomy (S2A2)
Sponsor: NASA, University Leadership Initiative (ULI)
Duration: 2020–2025
Project Description: The last few decades have witnessed uninterrupted growth in traditional commercial aviation, creating modernization requirements for the National Airspace System (NAS) to meet increasing needs for capacity with safety through such initiatives as NextGen. The recent introduction of unmanned systems into the NAS will bring further challenges and opportunities for the nation’s aviation system. The integration of such a complex transportation system creates a clear need to develop new technologies and innovative operational concepts for secure and safe assured autonomy. An unmanned systems future will see the integration of a wide variety of Unmanned Aerial Systems (UAS), personal air vehicles, Urban Air Mobility (UAM) vehicles, and cargo and special mission aircraft into the NAS. These developments can leverage UAS Traffic Management (UTM) advancements for the unique requirements of UAM airspace management. This vision must include robust human-machine decision-making systems for increasingly autonomous traffic management. These unmanned systems and the associated decision-making infrastructure systems must handle atmospheric, traffic, and airspace uncertainties and must operate securely and safely at different levels of system complexity. Adopting this vision will provide greater diversity and richness for the NAS; however, critical technical challenges must be addressed to ensure secure and safe cyber-physical aviation systems. The primary goal of this project is to ensure safe, secure and robust integration of autonomous vehicles into a UAM- tailored transportation infrastructure while maintaining compliance with existing commercial and civil air transportation safety standards.
Past Sponsored Projects
NRI: FND: Robust and Scalable Planning for Agile and Collaborative Robot Teammates in Complex Environments
Sponsor: National Science Foundation
Duration: Sept. 2019–Aug. 2025

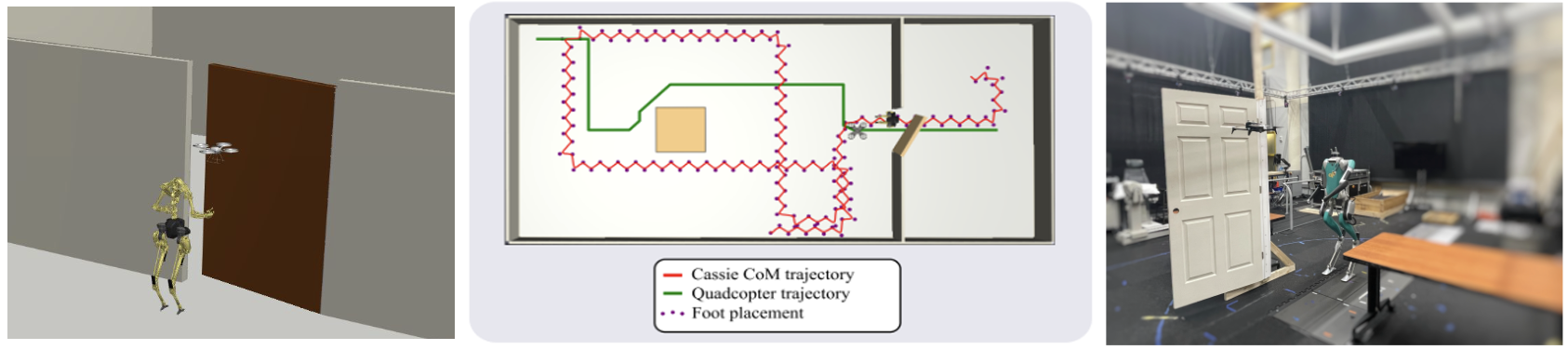
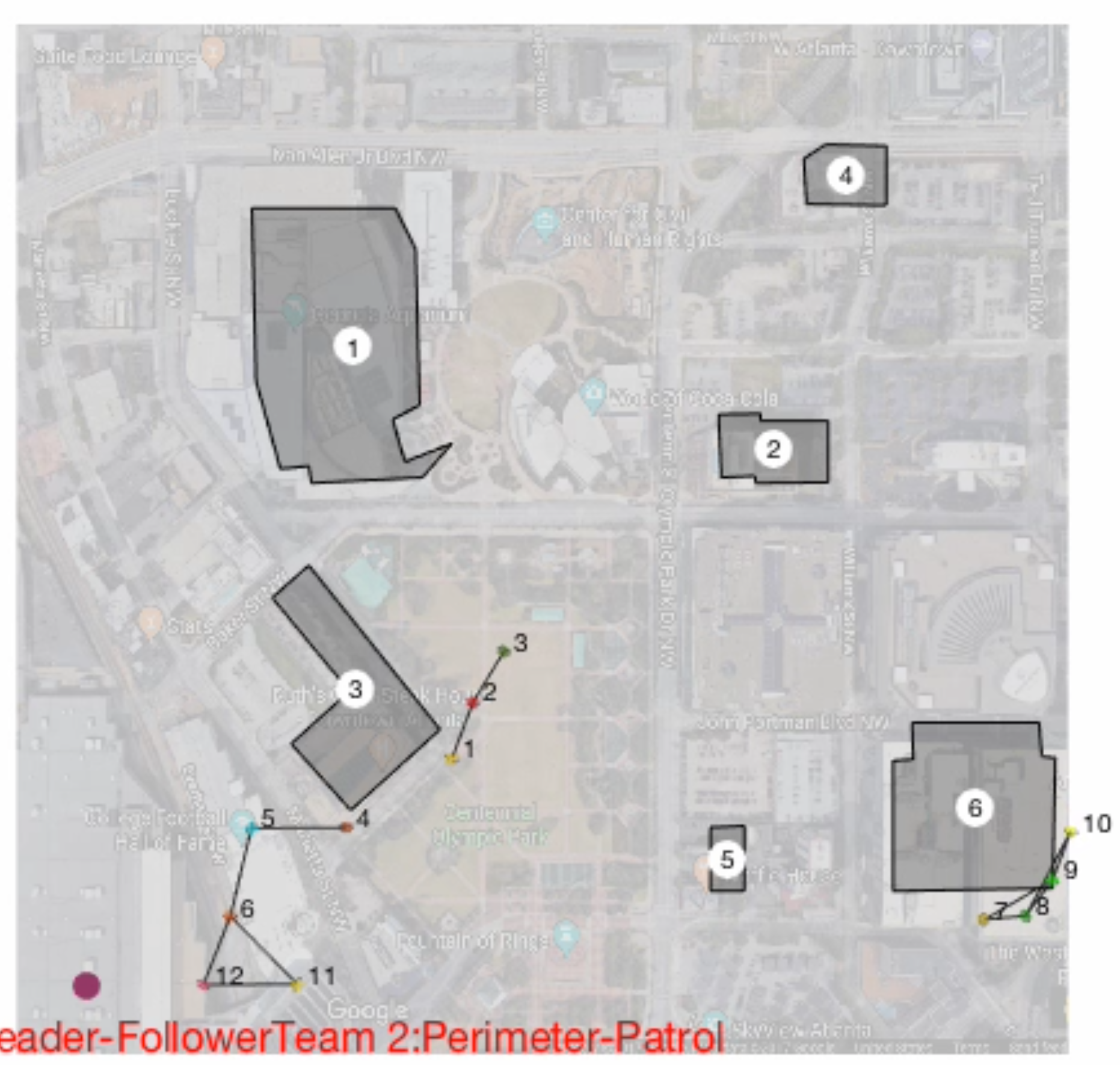
Project Description: Collaborative robot teams may one day become ubiquitous in our lives, accompany humans in challenging environments, perform a wide range of task, and even surpsass human capabilities where needed. This potential offers a significant opportunity for co-robot teams to collaborate effectively and reliably with humans for daily life and rescue tasks. However, it remains challenging to design robotic decision-making and planning algorithms that are scalable to complex real world scenarios and that provide formal safety assurances. Formal decision-making methods are critical in reasoning about how robot teammates collaborate in unstructured environments, e.g., how a ground robot coordinates with aerial robots for search and rescue tasks, or how a humanoid robot cooperates with humans to deliver supplies in confined space. This challenge will be accentuated when robots are required to perform tasks at or beyond human-level dexterity and proficiency. The overarching vision of this interdisciplinary project is to achieve robust and scalable algorithms for ubiquitous co-robots maneuvering in complex environments while effectively collaborating with humans for various tasks. A wide range of applications will be targeted, including home care applications and search and rescue tasks.
NASA Safe Aviation Autonomy
Sponsor: NASA, University Leadership Initiative (ULI)
Duration: Jan. 2023–Aug. 2025
Project Description: Future autonomous aviation systems, such as cyber-taxis, are expected to complete millions of flights per day. These systems have the potential to significantly benefit from machine-learning-enabled components for enhanced perception, decision-making, and control that outperform their traditional, non-learning based counterparts. Despite the promise of deploying machine learning (ML) in future aviation systems, today's ML methods remain poor at generalizing to unseen conditions and lack formal safety guarantees. Our goal is to develop safe, trustworthy, and robust ML methods that will usher in a new level of autonomy in the national airspace. Further information at the project webpage.
CAREER: Correct-By-Design Control of Traffic Flow Networks
Sponsor: National Science Foundation
Duration: Feb. 2018–Sep. 2024
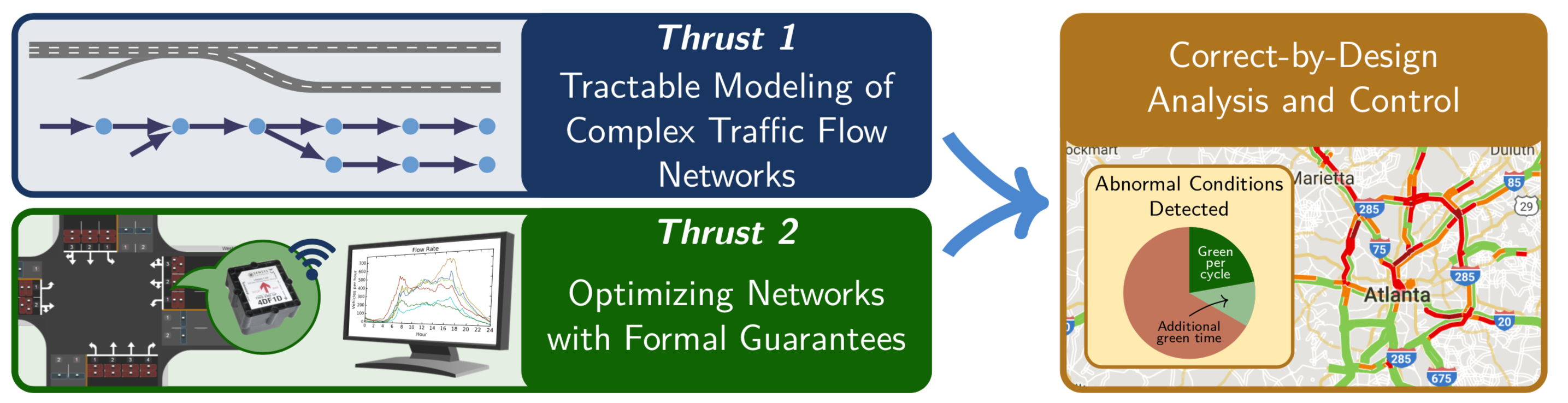
Project Description: Modern cities accommodate more people than ever before, leading to transportation networks that operate at or near capacity. In addition, the next generation of transportation systems will include connected vehicles, connected infrastructure, and increased automation, and these advances must coexist with legacy technology into the foreseeable future. Accommodating these rapidly developing advancements requires smarter and more efficient use of existing infrastructure with guarantees of performance, safety, and interoperability. The goal of this project is to develop fundamental theory and domain-driven techniques for controlling traffic flow in large-scale transportation networks. Recent advances in inexpensive sensors, wireless technology, and the Internet of Things (IoT) enable real-time connectivity of vehicles and infrastructure that offers abundant data and unprecedented opportunities for efficient and optimized transportation systems. The main technical goal is to develop techniques and algorithms that are correct-by-design, ensuring that these transportation systems satisfy required operating specifications. The project will focus on the following objectives: i) Develop theory and models for the dynamic behavior of traffic networks that captures domain-specific phenomena such as congestion propagation, ii) Determine how traffic flow dynamics will change as vehicles are increasingly equipped with autonomous capabilities, iii) Identify and exploit intrinsic structure in traffic flow networks to enable scalable formal methods for verification and synthesis, and iv) Use data available through industry collaborations to develop probabilistically correct control of traffic flow networks. These objectives address a growing need for systematic guarantees of performance in traffic networks as the increasing complexity and interdependence of transportation systems renders ad hoc approaches insufficient.
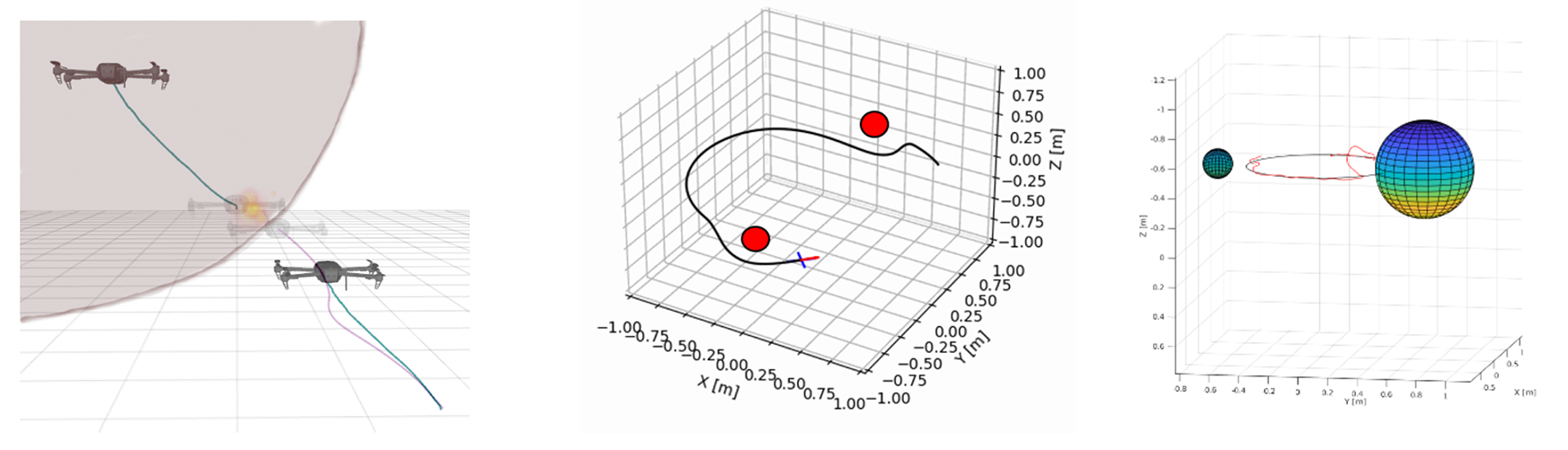
Going the Last Mile with Heterogeneous Robot Teams
Sponsor: Ford Motor Company
Duration: Jun. 2021–May 2023
Project Description: For autonomous package delivery, moving parcels from the road to a doorstep is a significant hurdle. This project will work to develop core theory and algorithms for coordinating multiple interacting mobile robots tasked with, e.g., package delivery in complex environments. The objective is end-to-end autonomous journeys for such teams operating in complex and cluttered 3D environments, possibly with humans present in the environment. The project plans to deliver a novel computational framework, as well as an implementation performed on teams of real-world robots.
CPS: Medium: Dynamic Pricing for Optimal Design of Sustainable Transportation Systems
Sponsor: National Science Foundation
Duration: Oct. 2019–Sept. 2023
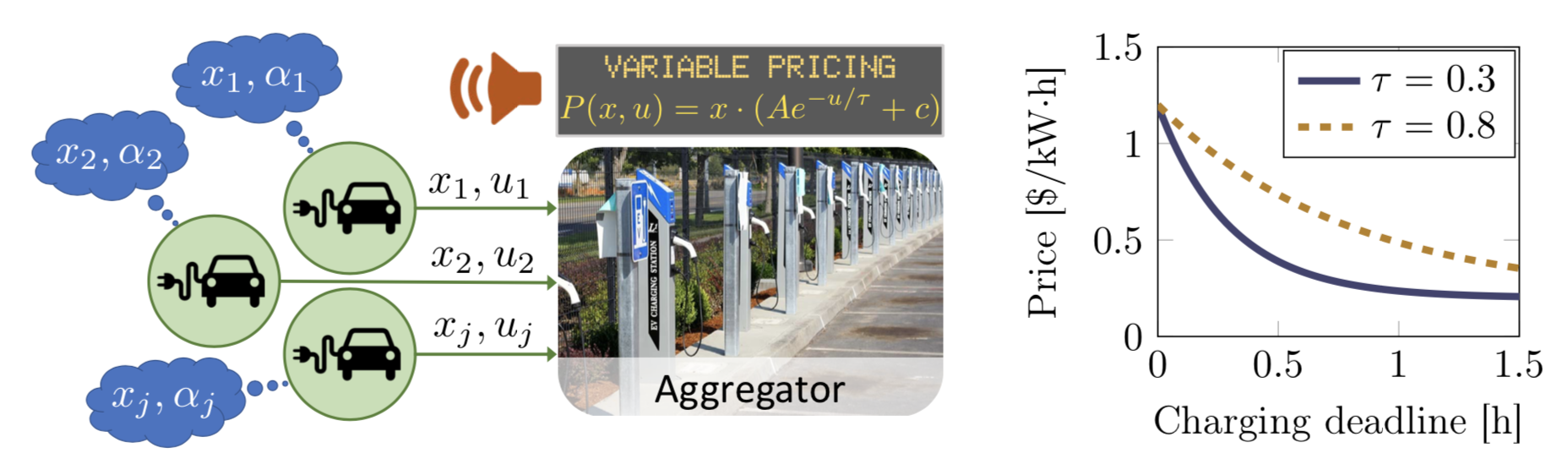
Project Description: This project will study the use of pricing to influence behavior in human-in-the-loop cyber-physical systems with an emphasis on electric vehicle (EV) charging. Given that EV charging can take hours, EV charging infrastructure often serves two purposes whose relative importance shifts dynamically depending on context: fueling the vehicle and providing a parking spot. Dynamic pricing tools communicated through apps are capable of influencing driver behavior to achieve desirable outcomes in both purposes. The results of the project will be tested using the Georgia Tech EV charging system as a testbed. The proposed combination of theoretical and empirical work on dynamic pricing tools for behavioral influence is highly translatable to other systems where prices can be directly communicated to consumers. Price-mediated EV driver behavior is highly societally relevant, with major ramifications for the sustainability of the long-term transportation system. The electric vehicle revolution will inextricably intertwine transportation infrastructure and energy infrastructure in new and significant ways that will alter how people consume electricity and how people move around. New interdependencies caused by the electrification of the transportation system will induce additional strain and will likely expose new vulnerabilities that dynamic pricing-based behavioral nudges could help mitigate.
CPS: Medium: Collaborative Research: Certifiable Reinforcement Learning for Cyber-Physical Systems
Sponsor: National Science Foundation
Duration: Sep. 2018–Aug 2023
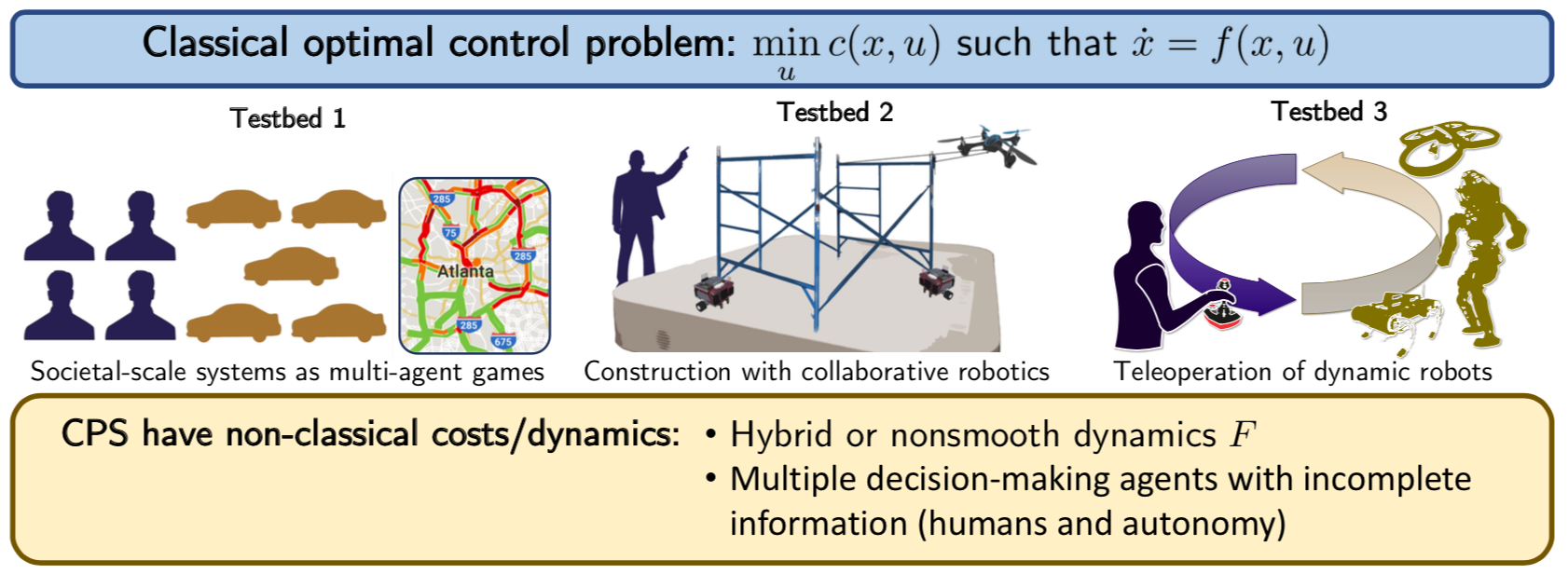
Project Description: We propose to generalize and certify the performance of reinforcement learning algorithms for control of cyber-physical systems (CPS). Broadly speaking, reinforcement learning applied to physical systems is concerned with making predictions from data to control the system to extremize a performance criterion. The project will particularly focus on developing theory and algorithms applicable to hybrid and multi-agent control systems, that is, systems with continuous and discrete elements and systems with multiple decision-making agents, which are ubiquitous in CPS across spatiotemporal scales and application domains. Reinforcement learning algorithms are not yet mature enough to guarantee performance when applied to control of CPS. In light of these limitations, this project aims to lay the theoretical and computational foundation to certify reinforcement learning algorithms so that they may be deployed in society with high confidence.
AFOSR Young Investigator Award: Scalable Analysis and Control of Dynamic Flow Networks
Sponsor: Air Force Office of Scientific Research
Duration: Jan. 2019–Dec. 2021
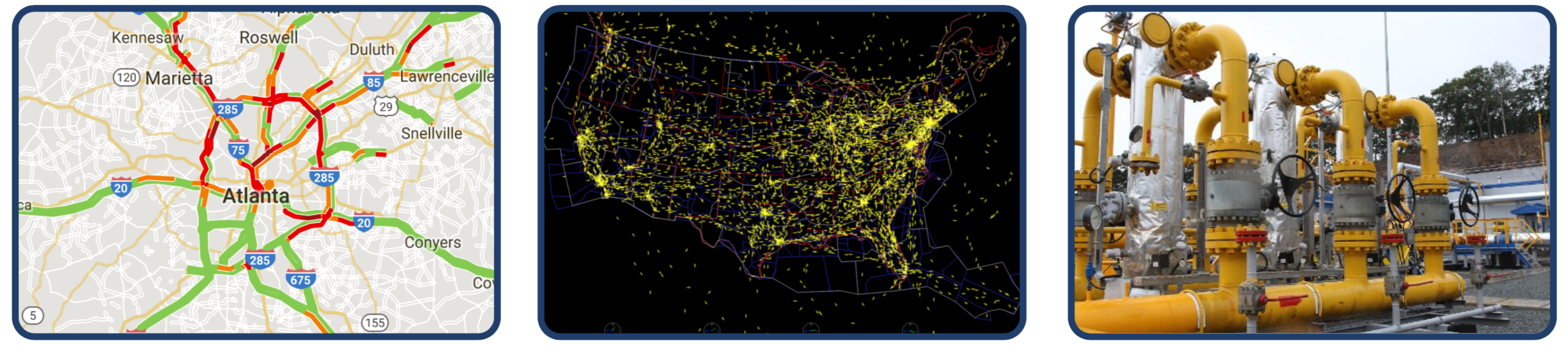
Project Description: This project will develop fundamental theory for controlling and designing networks that model the flow of physical material among interconnected components. Such systems are called physical flow networks and are used to model, for example, vehicular transportation networks, air traffic networks, and civil infrastructure. The fundamental commonalities of such flow networks suggest a unified approach for modeling, while domain-specific features point towards a full understanding of their rich behavior. In physical flow networks, nonlinearities in each component compound due to the network interactions. For example, congestion in one link of a road network can impact traffic flow in other parts of the network over time. In applications, such networks are becoming larger, more complex, and increasingly distributed, and there is an urgent need to study the mathematical models that underlie many of these systems. The proposed research will focus on using and extending tools from nonlinear system analysis to study and control these physical flow networks.
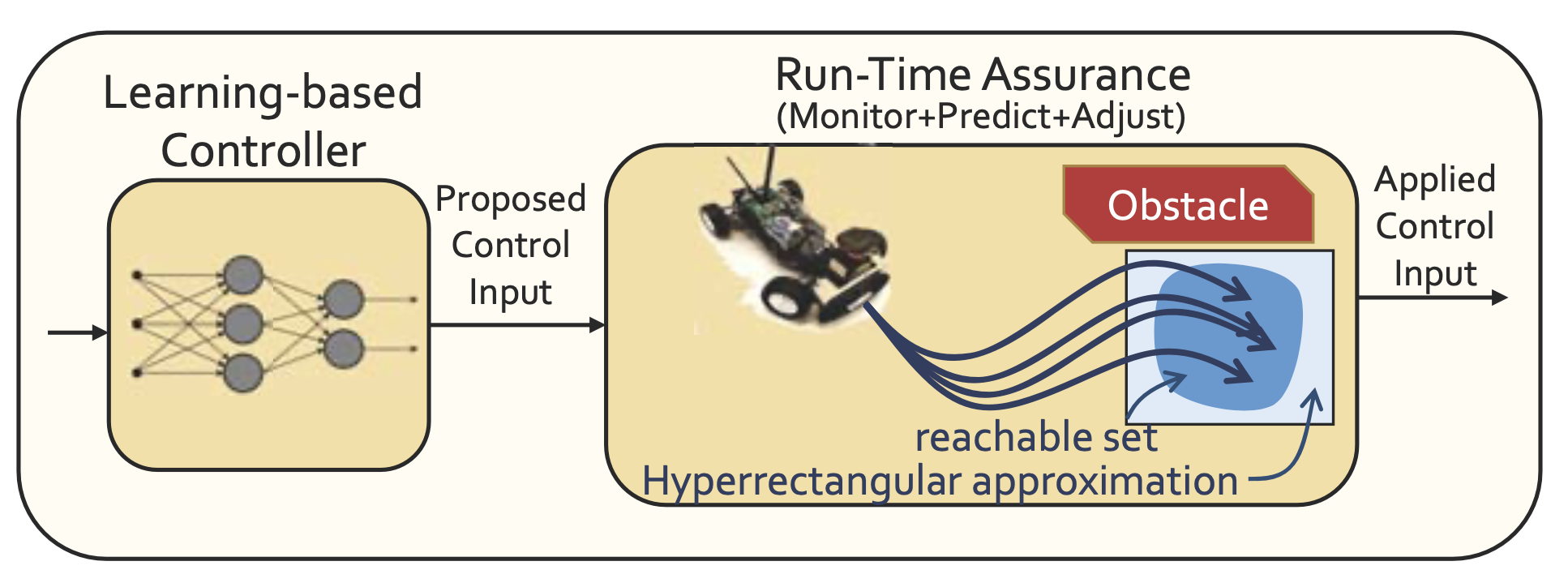
Safe Autonomy for Learning-Enabled Cyber-Physical Systems
Sponsor: Cisco
Duration: Sep. 2021–Aug. 2022
Project Description: Any safety critical system must be able to anticipate the range of possible effects of its actions caused by uncertainty in unknown or complex environments. This is especially critical for systems incorporating learning-based elements such as those found commonly in, e.g., reinforcement learning applications. A runtime assurance (RTA) mechanism acts as an intermediary between a learning-based controller and the plant, i.e., the system to be controlled. The RTA mechanism is responsible for monitoring proposed inputs from the learning-based controller, predicting the range of possible effects from the proposed inputs, and adjusting the inputs before being applied to the plant if needed in order to ensure safety of the system. This project will develop a learning-enabled RTA mechanism that also learns about the system and environment. In particular, we propose developing an RTA mechanism that begins with a crude model of the system plant incorporating the possibility for large uncertainties and disturbances in order to capture the unknown elements of the system and its environment. Initially, the RTA-allowed control actions for the plant will be quite conservative in order to guarantee safety with such large uncertainties. Over time, however, the RTA will learn and update its model, reducing the uncertainties and disturbances.
Coordinated Anti-congestion Control Algorithms for Diverging Diamond Interchanges
Sponsor: Georgia Department of Transportation
Duration: Jul. 2019–Apr. 2021
Project Description: Diverging Diamond Interchanges (DDI) are a new traffic interchange design that moves traffic to the opposite side of the road at a freeway underpass or overpass, allowing vehicles to enter and exit the freeway via unimpeded left-hand turns. This arrangement improves safety, as vehicles do not need to turn left against oncoming traffic to enter the freeway, and has the potential to improve mobility, as this configuration requires only two two-phase traffic intersections. In this project, we propose a data-driven, model-free approach to optimize the coordinated control of DDIs with neighboring intersections and freeway traffic control devices such as ramp meters. Coordinated DDIs are well-suited for such data-driven approaches because their relatively simple operation via two two-phase traffic signals drastically reduces the search space for optimal timing parameters. In particular, at each time instant, the two signals can be in one of three general red-green configurations, discounting the yellow-phase (it is not possible to simultaneously allow opposing through movements, eliminating the fourth possible configuration). Moreover, in a coordinated setting, it is most reasonable to consider cycle times that evenly divide (or, less likely, are an even multiple of) the cycle time of the adjacent coordinated intersections. In addition to these discrete possibilities for phase timing, the relative offset of the DDI signal timing can also be adjusted as well.
SCC-IRG Track 2: Data-Informed Modeling and Correct-by-Design Control Protocols for Personal Mobility in Intelligent Urban Transportation Systems
Sponsor: National Science Foundation
Duration: Aug. 2017–July 2020
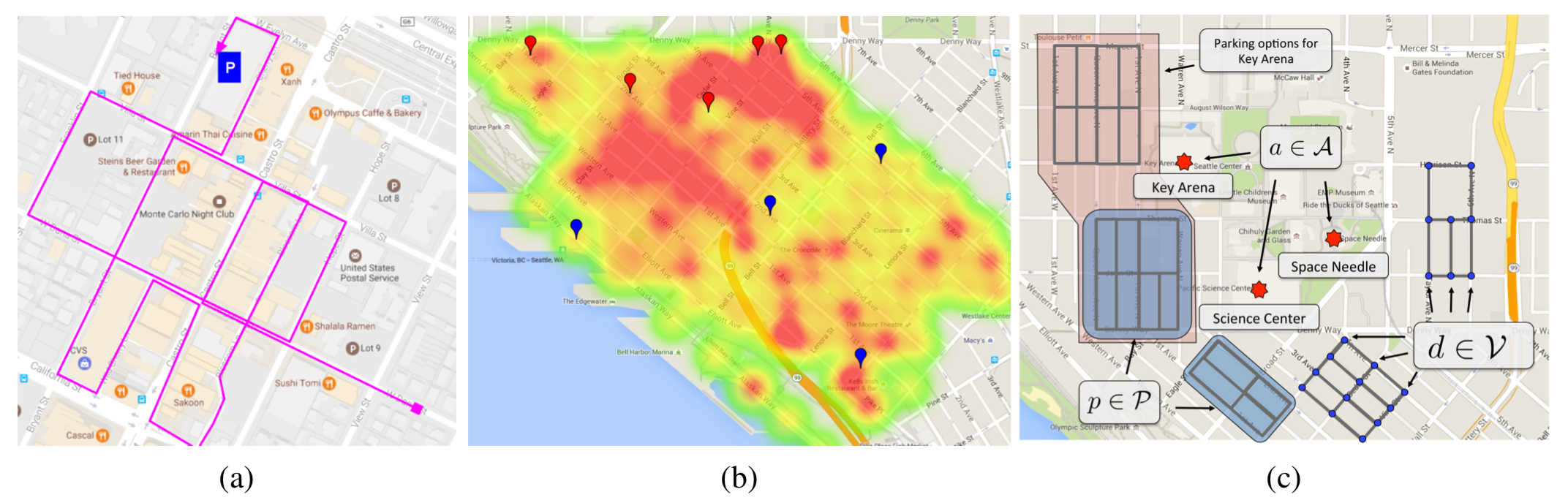
Project Description: This Smart and Connected Communities project will develop a unified model-based and data-driven framework for modeling and controlling three core components of personal mobility in intelligent urban transportation: parking, ride-sharing services, and traffic flow on urban arterial roads. Data from recently installed technologies such as smart parking meters and probe-based sensors (e.g., wifi sensors) can be leveraged in, e.g., designing dynamic parking pricing and to help guide drivers to available parking spaces using smart-device apps. Such data will be available via collaborations with the Departments of Transportation (DOT) in Los Angeles and Seattle. Furthermore, we will engage several commercial districts in Los Angeles and Seattle, which are significant stakeholders in new parking systems and serve very diverse communities. Coupling new technologies with methodological innovations, this project aims to reduce negative impacts of traffic congestion on the environment, quality of life, productivity, and physical and financial well-being. In-situ experimental trials will allow for the impact of policy changes suggested by the research to be assessed. Collaborations with municipal partners will also be leveraged to create opportunities for workforce development that avail students to domain experts and aid in research-capacity building.
Composition of Coordinated Behaviors for Autonomous Vehicle Teams
Sponsor: DARPA
Duration: Aug. 2017–Aug. 2018
Project Description: By now, teams of unmanned vehicles have been successfully deployed in the air, on the ground, and under water. But, to manage such a fleet of unmanned vehicles is an unwieldy task, with a number of constraints (such as safety or communication limits) having to be effectively balanced with the progression towards task completion. From a systems-operator's vantage-point, an additional layer of complexity stems from the fact that the types of coordinated behaviors the team can execute are typically specified in terms of geometric formations. Going from a high-level mission to a sequence of such geometrically defined, coordinated motion primitives is not only a labor and time intensive exercise, it also requires additional monitoring and oversight to ensure that the team can effectively transition among the behaviors, which is accentuated by the need to redefine and adapt the sequences in response to changing, unforeseen environmental conditions. A framework for Composition of Correct-by-Construction Collective Behaviors (C3B) will be developed that supports the idea of Modular Autonomy, where individual autonomous, coordinated behaviors can be designed and tested in isolation, and then subsequently be composed together in a provably correct manner.
Data-Driven Sustainable EV Infrastructure for Los Angeles
Sponsor: UCLA Sustainable LA Grand Challenge Research Grants Program
Duration: Jan. 2017–Dec. 2017

Project Description: Widespread adoption of EVs requires the development of a reliable and efficient charging infrastructure that is cognizant of the interplay between peak system loads in the electricity grid and EV charging behavior. This collaborative project will establish data-driven models of EV charging behavior and will use these models to develop theory and algorithms for reducing costs and optimizing the efficiency of EV charging. The project will also seek to provide the first large-scale evidence on EV charging behavior using data from nearly 35,000 charging stations via PlugShare, the world's largest and most widely used EV charge station locator app.
Control and Management of Urban Traffic Networks with Mixed Autonomy
Sponsor: California Department of Transportation (Caltrans)
Duration: Feb. 2017–Jan. 2018

Project Description: Autonomous vehicles promise to transform transportation and mobility. While the most dramatic changes likely remain decades away, semiautonomous capabilities such as adaptive cruise control are already available. These technologies will coexist and interact with traditional, manually driven vehicles into the foreseeable future. As a result, transportation infrastructure is entering a stage of mixed use whereby vehicles are capable of varying levels of autonomy. Understanding and harnessing the potential benefits of this mixed infrastructure is a critical step to fully realizing the mobility benefits of autonomy. This project will develop models and algorithms for controlling mixed traffic flow where some fraction of vehicles are equipped with varying levels of autonomy and the remaining are manually driven. In particular, we will develop models of link and network capacity for mixed traffic. These models will be developed from first principles based on the fundamental behavior of autonomous technologies such as adaptive cruise control and validated with simulation data. We will then utilize these models to develop algorithms for management and control of mixed traffic. The overarching goal of the project is to develop theory and techniques that fully leverage the mixed traffic flow to improve mobility at the network scale.
Traffic Predictive Control
Sponsor: California Department of Transportation (Caltrans)
Duration: May 2016–Apr. 2017
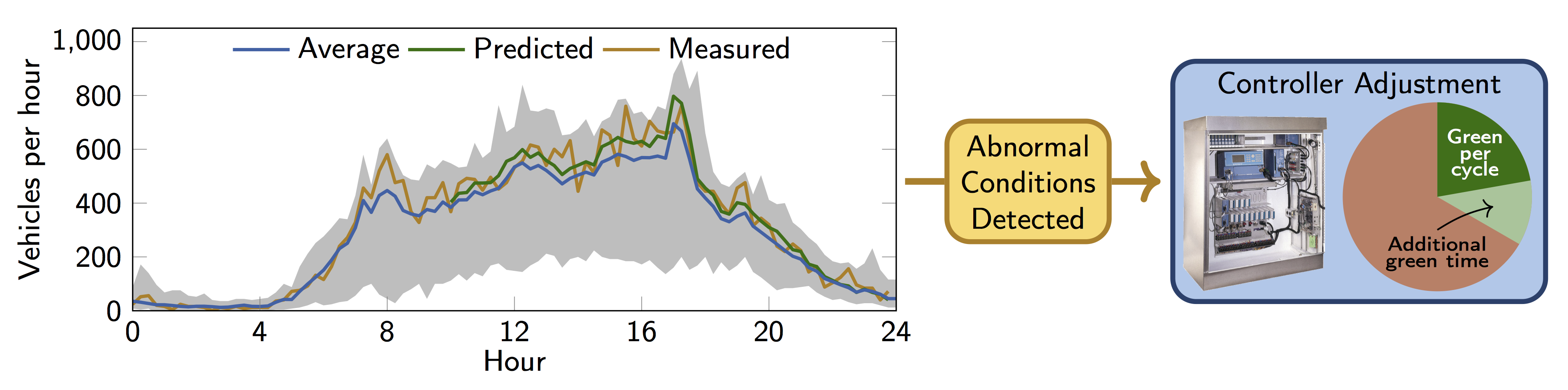
Project Description: The advent of ubiquitous traffic sensing provides unprecedented real-time, high-resolution data of traffic conditions that elucidate historical trends and current traffic conditions, yet traditional signal control approaches are designed to operate with limited or no real-time and/or historical data. Adaptive control schemes adjust to accommodate current traffic demands yet have been observed to react slowly to changing conditions. In contrast, nonadaptive signal timing schemes are designed based on limited and often outdated historical measurements. This project seeks to fully leverage historical and real-time traffic data and proposes traffic predictive control for improved efficiency on arterial corridors. The proposed approach learns statistical trends from collected historical data using principle component-based decomposition techniques. Then, real-time measurements are compared against historical trends to predict traffic flow minutes or hours into the future. Based on this prediction, preemptive control strategies accommodate deviations in traffic conditions before they occur. Additionally, these historical trends are used to identify when anomalous traffic conditions have occurred or are likely to occur soon. This anomaly detection serves as a component of decision support systems to notify when traffic conditions are likely to require additional resources.
